MongoDB
MongoDB 是由C++语言编写的,是一个基于分布式文件存储的开源数据库系统。 在高负载的情况下,添加更多的节点,可以保证服务器性能。 MongoDB 旨在为WEB应用提供可扩展的高性能数据存储解决方案。
MongoDB 主要特点
- MongoDB 是一个面向文档存储的数据库,操作起来比较简单和容易。
- 你可以在MongoDB记录中设置任何属性的索引 (如:FirstName=”Sameer”,Address=”8 Gandhi Road”)来实现更快的排序。
- 你可以通过本地或者网络创建数据镜像,这使得MongoDB有更强的扩展性。
- 如果负载的增加(需要更多的存储空间和更强的处理能力) ,它可以分布在计算机网络中的其他节点上这就是所谓的分片。
- Mongo支持丰富的查询表达式。查询指令使用JSON形式的标记,可轻易查询文档中内嵌的对象及数组。
- MongoDb 使用update()命令可以实现替换完成的文档(数据)或者一些指定的数据字段 。
- Mongodb中的Map/reduce主要是用来对数据进行批量处理和聚合操作。
- Map和Reduce。Map函数调用emit(key,value)遍历集合中所有的记录,将key与value传给Reduce函数进行处理。
- Map函数和Reduce函数是使用Javascript编写的,并可以通过db.runCommand或mapreduce命令来执行MapReduce操作。
- GridFS是MongoDB中的一个内置功能,可以用于存放大量小文件。
- MongoDB允许在服务端执行脚本,可以用Javascript编写某个函数,直接在服务端执行,也可以把函数的定义存储在服务端,下次直接调用即可。
- MongoDB支持各种编程语言:RUBY,PYTHON,JAVA,C++,PHP,C#等多种语言。
- MongoDB安装简单。
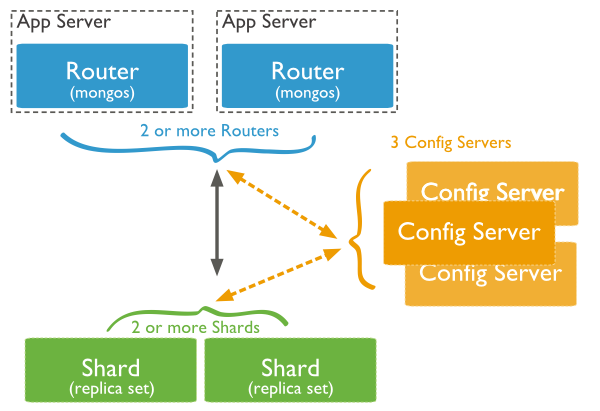
MongoDB 分片
在Mongodb里面存在另一种集群,就是分片技术,可以满足MongoDB数据量大量增长的需求。
当MongoDB存储海量的数据时,一台机器可能不足以存储数据,也可能不足以提供可接受的读写吞吐量。这时,我们就可以通过在多台机器上分割数据,使得数据库系统能存储和处理更多的数据。
为什么使用分片
- 复制所有的写入操作到主节点
- 延迟的敏感数据会在主节点查询
- 单个副本集限制在12个节点
- 当请求量巨大时会出现内存不足。
- 本地磁盘不足
- 垂直扩展价格昂贵
-
Shard: 用于存储实际的数据块,实际生产环境中一个shard server角色可由几台机器组个一个replica set承担,防止主机单点故障
-
Config Server: mongod实例,存储了整个 ClusterMetadata,其中包括 chunk信息。
-
Query Routers:前端路由,客户端由此接入,且让整个集群看上去像单一数据库,前端应用可以透明使用。
Level DB
K-V 数据库,分为 LOG,MANIFEST,Sstable,CURRENT
LevelDB是Google开源的持久化KV单机数据库,具有很高的随机写,顺序读/写性能,但是随机读的性能很一般,也就是说,LevelDB很适合应用在查询较少,而写很多的场景
特点: 1、key和value都是任意长度的字节数组; 2、entry(即一条K-V记录)默认是按照key的字典顺序存储的,当然开发者也可以重载这个排序函数; 3、提供的基本操作接口:Put()、Delete()、Get()、Batch(); 4、支持批量操作以原子操作进行; 5、可以创建数据全景的snapshot(快照),并允许在快照中查找数据; 6、可以通过前向(或后向)迭代器遍历数据(迭代器会隐含的创建一个snapshot); 7、自动使用Snappy压缩数据; 8、可移植性;
限制: 1、非关系型数据模型(NoSQL),不支持sql语句,也不支持索引; 2、一次只允许一个进程访问一个特定的数据库; 3、没有内置的C/S架构,但开发者可以使用LevelDB库自己封装一个server;
Level DB folder struct
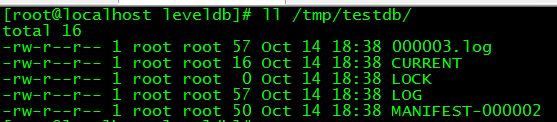
- CURRENT
- LOG
- LOCK
- MANIFEST :
log文件、MemTable、SSTable文件都是用来存储k-v记录的
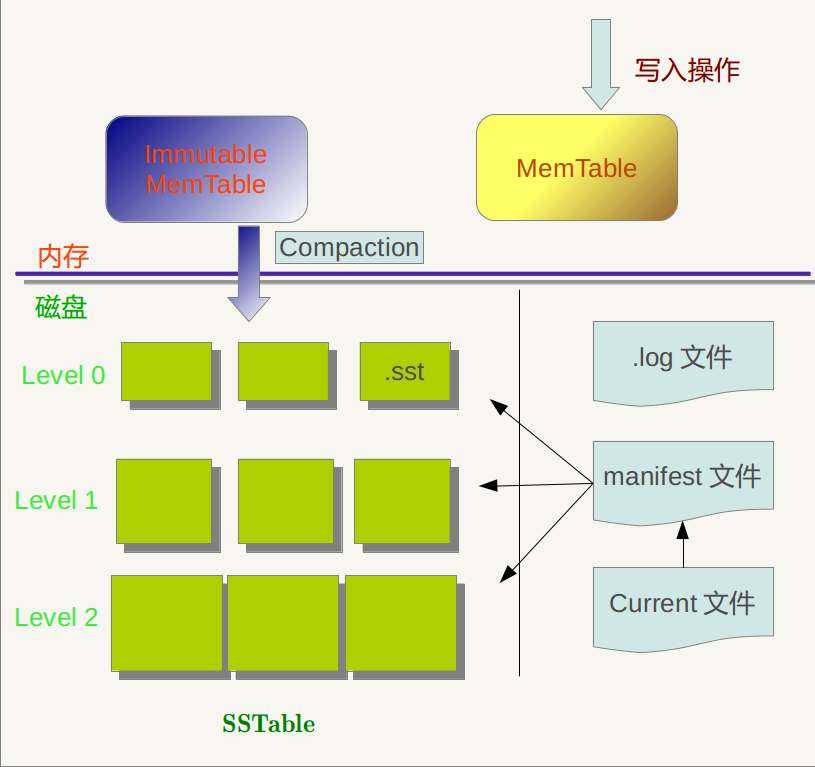
SSTable中的某个文件属于特定层级,而且其存储的记录是key有序的,那么必然有文件中的最小key和最大key,这是非常重要的信息,Manifest 就记载了SSTable各个文件的管理信息,比如属于哪个Level,文件名称叫啥,最小key和最大key各自是多少。下图是Manifest所存储内容的示意
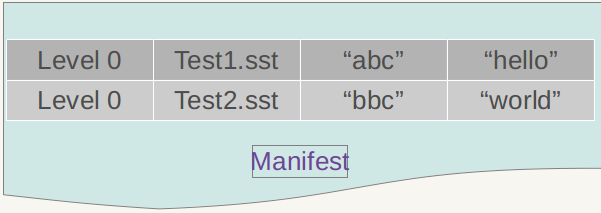
另外,在LevleDb的运行过程中,随着Compaction的进行,SSTable文件会发生变化,会有新的文件产生,老的文件被废弃,Manifest也会跟着反映这种变化,此时往往会新生成Manifest文件来记载这种变化,而Current则用来指出哪个Manifest文件才是我们关心的那个Manifest文件。
写操作流程:
1、顺序写入磁盘log文件; 2、写入内存memtable(采用skiplist结构实现); 3、写入磁盘SST文件(sorted string table files),这步是数据归档的过程(永久化存储);
注意:
log文件的作用是是用于系统崩溃恢复而不丢失数据,假如没有Log文件,因为写入的记录刚开始是保存在内存中的,此时如果系统崩溃,内存中的数据还没有来得及Dump到磁盘,所以会丢失数据; 在写memtable时,如果其达到check point(满员)的话,会将其改成immutable memtable(只读),然后等待dump到磁盘SST文件中,此时也会生成新的memtable供写入新数据; memtable和sst文件中的key都是有序的,log文件的key是无序的; LevelDB删除操作也是插入,只是标记Key为删除状态,真正的删除要到Compaction的时候才去做真正的操作; LevelDB没有更新接口,如果需要更新某个Key的值,只需要插入一条新纪录即可;或者先删除旧记录,再插入也可;
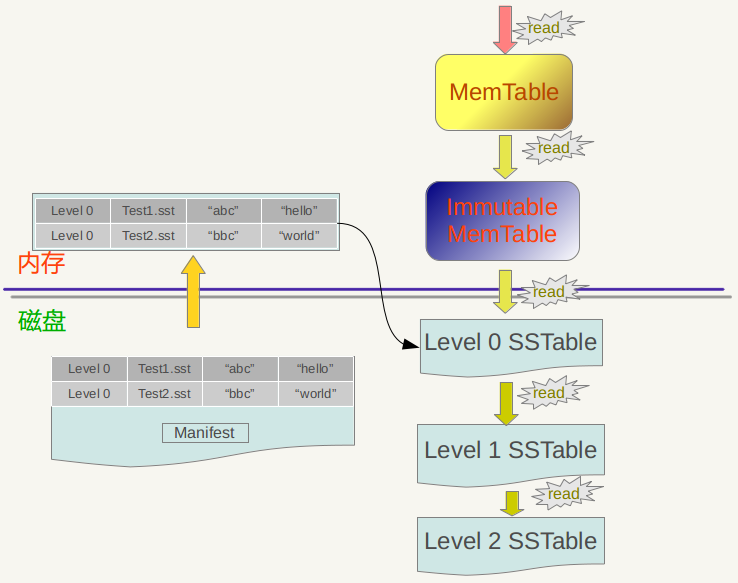
读操作流程:
1、在内存中依次查找memtable、immutable memtable; 2、如果配置了cache,查找cache; 3、根据mainfest索引文件,在磁盘中查找SST文件
举个例子:我们先往levelDb里面插入一条数据 {key=”www.samecity.com” value=”我们”},过了几天,samecity网站改名为:69同城,此时我们插入数据{key=”www.samecity.com” value=”69同城”},同样的key,不同的value;逻辑上理解好像levelDb中只有一个存储记录,即第二个记录,但是在levelDb中很可能存在两条记录,即上面的两个记录都在levelDb中存储了,此时如果用户查询key=”www.samecity.com”,我们当然希望找到最新的更新记录,也就是第二个记录返回,因此,查找的顺序应该依照数据更新的新鲜度来,对于SSTable文件来说,如果同时在level L和Level L+1找到同一个key,level L的信息一定比level L+1的要新
SSTable文件
SST文件并不是平坦的结构,而是分层组织的,这也是LevelDB名称的来源
SST文件的一些实现细节:
1、每个SST文件大小上限为2MB,所以,LevelDB通常存储了大量的SST文件; 2、SST文件由若干个4K大小的blocks组成,block也是读/写操作的最小单元; 3、SST文件的最后一个block是一个index,指向每个data block的起始位置,以及每个block第一个entry的key值(block内的key有序存储); 4、使用Bloom filter加速查找,只要扫描index,就可以快速找出所有可能包含指定entry的block。 5、同一个block内的key可以共享前缀(只存储一次),这样每个key只要存储自己唯一的后缀就行了。如果block中只有部分key需要共享前缀,在这部分key与其它key之间插入”reset”标识。
由log直接读取的entry会写到Level 0的SST中(最多4个文件);
当Level 0的4个文件都存储满了,会选择其中一个文件Compact到Level 1的SST中;
注意:Level 0的SSTable文件和其它Level的文件相比有特殊性:这个层级内的.sst文件,两个文件可能存在key重叠,比如有两个level 0的sst文件,文件A和文件B,文件A的key范围是:{bar, car},文件B的Key范围是{blue,samecity},那么很可能两个文件都存在key=”blood”的记录。对于其它Level的SSTable文件来说,则不会出现同一层级内.sst文件的key重叠现象,就是说Level L中任意两个.sst文件,那么可以保证它们的key值是不会重叠的。
Log:最大4MB (可配置), 会写入Level 0; Level 0:最多4个SST文件,; Level 1:总大小不超过10MB; Level 2:总大小不超过100MB; Level 3+:总大小不超过上一个Level ×10的大小。
比如:0 ↠ 4 SST, 1 ↠ 10M, 2 ↠ 100M, 3 ↠ 1G, 4 ↠ 10G, 5 ↠ 100G, 6 ↠ 1T, 7 ↠ 10T
在读操作中,要查找一条entry,先查找log,如果没有找到,然后在Level 0中查找,如果还是没有找到,再依次往更底层的Level顺序查找;如果查找了一条不存在的entry,则要遍历一遍所有的Level才能返回”Not Found”的结果。
在写操作中,新数据总是先插入开头的几个Level中,开头的这几个Level存储量也比较小,因此,对某条entry的修改或删除操作带来的性能影响就比较可控。
可见,SST采取分层结构是为了最大限度减小插入新entry时的开销;
Compaction操作
对于LevelDb来说,写入记录操作很简单,删除记录仅仅写入一个删除标记就算完事,但是读取记录比较复杂,需要在内存以及各个层级文件中依照新鲜程度依次查找,代价很高。为了加快读取速度,levelDb采取了compaction的方式来对已有的记录进行整理压缩,通过这种方式,来删除掉一些不再有效的KV数据,减小数据规模,减少文件数量等。
LevelDb的compaction机制和过程与Bigtable所讲述的是基本一致的,Bigtable中讲到三种类型的compaction: minor ,major和full:
minor Compaction,就是把memtable中的数据导出到SSTable文件中; major compaction就是合并不同层级的SSTable文件; full compaction就是将所有SSTable进行合并; LevelDb包含其中两种,minor和major。
Minor compaction 的目的是当内存中的memtable大小到了一定值时,将内容保存到磁盘文件中,如下图
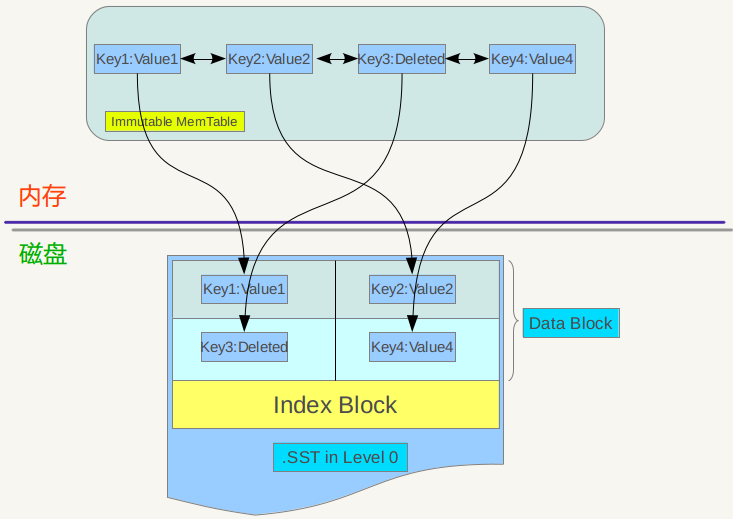
immutable memtable其实是一个SkipList,其中的记录是根据key有序排列的,遍历key并依次写入一个level 0 的新建SSTable文件中,写完后建立文件的index 数据,这样就完成了一次minor compaction。从图中也可以看出,对于被删除的记录,在minor compaction过程中并不真正删除这个记录,原因也很简单,这里只知道要删掉key记录,但是这个KV数据在哪里?那需要复杂的查找,所以在minor compaction的时候并不做删除,只是将这个key作为一个记录写入文件中,至于真正的删除操作,在以后更高层级的compaction中会去做。
当某个level下的SSTable文件数目超过一定设置值后,levelDb会从这个level的SSTable中选择一个文件(level>0),将其和高一层级的level+1的SSTable文件合并,这就是major compaction。
我们知道在大于0的层级中,每个SSTable文件内的Key都是由小到大有序存储的,而且不同文件之间的key范围(文件内最小key和最大key之间)不会有任何重叠。Level 0的SSTable文件有些特殊,尽管每个文件也是根据Key由小到大排列,但是因为level 0的文件是通过minor compaction直接生成的,所以任意两个level 0下的两个sstable文件可能再key范围上有重叠。所以在做major compaction的时候,对于大于level 0的层级,选择其中一个文件就行,但是对于level 0来说,指定某个文件后,本level中很可能有其他SSTable文件的key范围和这个文件有重叠,这种情况下,要找出所有有重叠的文件和level 1的文件进行合并,即level 0在进行文件选择的时候,可能会有多个文件参与major compaction。
LevelDb在选定某个level进行compaction后,还要选择是具体哪个文件要进行compaction,比如这次是文件A进行compaction,那么下次就是在key range上紧挨着文件A的文件B进行compaction,这样每个文件都会有机会轮流和高层的level 文件进行合并。
如果选好了level L的文件A和level L+1层的文件进行合并,那么问题又来了,应该选择level L+1哪些文件进行合并?levelDb选择L+1层中和文件A在key range上有重叠的所有文件来和文件A进行合并。也就是说,选定了level L的文件A,之后在level L+1中找到了所有需要合并的文件B,C,D…..等等。剩下的问题就是具体是如何进行major 合并的?就是说给定了一系列文件,每个文件内部是key有序的,如何对这些文件进行合并,使得新生成的文件仍然Key有序,同时抛掉哪些不再有价值的KV 数据。
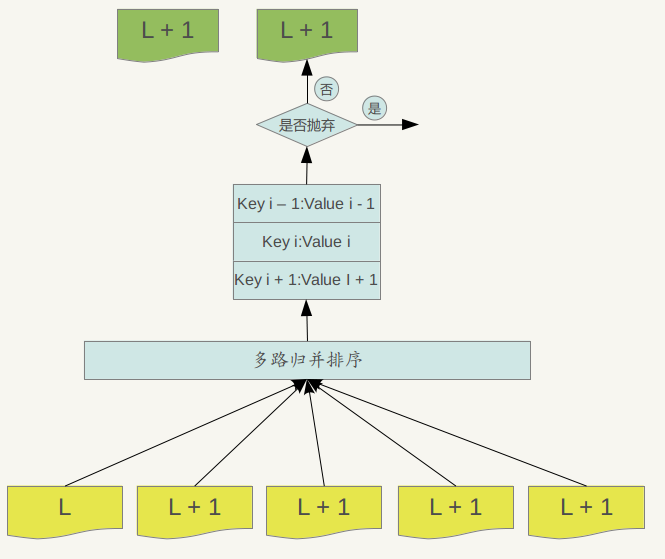
Major compaction的过程如下:对多个文件采用多路归并排序的方式,依次找出其中最小的Key记录,也就是对多个文件中的所有记录重新进行排序。之后采取一定的标准判断这个Key是否还需要保存,如果判断没有保存价值,那么直接抛掉,如果觉得还需要继续保存,那么就将其写入level L+1层中新生成的一个SSTable文件中。就这样对KV数据一一处理,形成了一系列新的L+1层数据文件,之前的L层文件和L+1层参与compaction 的文件数据此时已经没有意义了,所以全部删除。这样就完成了L层和L+1层文件记录的合并过程。
那么在major compaction过程中,判断一个KV记录是否抛弃的标准是什么呢?其中一个标准是:对于某个key来说,如果在小于L层中存在这个Key,那么这个KV在major compaction过程中可以抛掉。因为我们前面分析过,对于层级低于L的文件中如果存在同一Key的记录,那么说明对于Key来说,有更新鲜的Value存在,那么过去的Value就等于没有意义了,所以可以删除
Cache
前面讲过对于levelDb来说,读取操作如果没有在内存的memtable中找到记录,要多次进行磁盘访问操作。假设最优情况,即第一次就在level 0中最新的文件中找到了这个key,那么也需要读取2次磁盘,一次是将SSTable的文件中的index部分读入内存,这样根据这个index可以确定key是在哪个block中存储;第二次是读入这个block的内容,然后在内存中查找key对应的value。
LevelDb中引入了两个不同的Cache:Table Cache和Block Cache。其中Block Cache是配置可选的,即在配置文件中指定是否打开这个功能
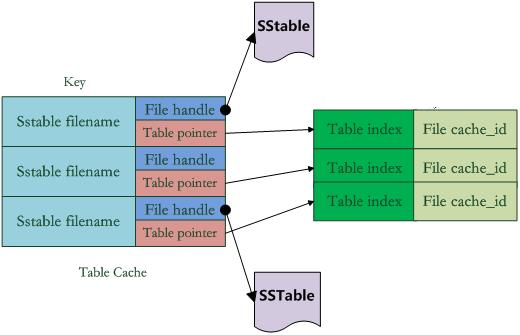
在Table Cache中,key值是SSTable的文件名称,Value部分包含两部分,一个是指向磁盘打开的SSTable文件的文件指针,这是为了方便读取内容;另外一个是指向内存中这个SSTable文件对应的Table结构指针,table结构在内存中,保存了SSTable的index内容以及用来指示block cache用的cache_id ,当然除此外还有其它一些内容。
比如在get(key)读取操作中,如果levelDb确定了key在某个level下某个文件A的key range范围内,那么需要判断是不是文件A真的包含这个KV。此时,levelDb会首先查找Table Cache,看这个文件是否在缓存里,如果找到了,那么根据index部分就可以查找是哪个block包含这个key。如果没有在缓存中找到文件,那么打开SSTable文件,将其index部分读入内存,然后插入Cache里面,去index里面定位哪个block包含这个Key 。如果确定了文件哪个block包含这个key,那么需要读入block内容,这是第二次读取
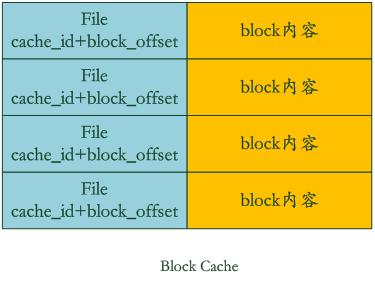
Block Cache是为了加快这个过程的,其中的key是文件的cache_id加上这个block在文件中的起始位置block_offset。而value则是这个Block的内容。
如果levelDb发现这个block在block cache中,那么可以避免读取数据,直接在cache里的block内容里面查找key的value就行,如果没找到呢?那么读入block内容并把它插入block cache中。levelDb就是这样通过两个cache来加快读取速度的。从这里可以看出,如果读取的数据局部性比较好,也就是说要读的数据大部分在cache里面都能读到,那么读取效率应该还是很高的,而如果是对key进行顺序读取效率也应该不错,因为一次读入后可以多次被复用。但是如果是随机读取,您可以推断下其效率如何
版本控制
在Leveldb中,Version就代表了一个版本,它包括当前磁盘及内存中的所有文件信息。在所有的version中,只有一个是CURRENT(当前版本),其它都是历史版本
CouchDB
couchDB的底层是一个B-tree的存储结构,为提高效率,所有的数据的插入或更新都是直接在树的叶子节点添加,不删除旧节点,通过版本号来确定最新的数据--版本号还能用来解决并发写的冲突。所以数据文件会越来越大,可以在适当地时间运行compact过程或replication过程,会删除旧文件,使得数据文件得到压缩。
文件型数据库
- MVCC(Multiversion concurrency control): CouchDB一个支持多版本控制的系统,此类系统通常支持多个结点写, 而系统会检测到多个系统的写操作之间的冲突并以一定的算法规则予以解决。
-
水平扩展性: 在扩展性方面,CouchDB使用replication去做。 CouchDB的设计基于支持双向的复制(同步)和离线操作。 这意味着多个复制能够对同一数据有其自己的拷贝,可以进行修改,之后将这些变更进行同步。
- REST API(Representational State Transfer,简称REST,表述性状态转移) REST使用HTTP方法 POST,GET,PUT和DELETE来操作对应的四个基本 CRUD(Create,Read,Update,Delete)操作来操作所有的资源
- 原子性: 支持针对行的原子性修改(concurrent modifications of single documents),但不支持更多的复杂事务操作
- 数据可靠性: CouchDB是一个”crash-only”的系统,你可以在任何时候停掉CouchDB并能保证数据的一致性
- 最终一致性 : CouchDB保证最终一致性,使其能够同时提供可用性和分割容忍
- 离线支持 : CoucbDB能够同步复制到可能会离线的终端设备(比如智能手机),同时当设置再次在线时处理数据同步。 CouchDB内置了一个的叫做Futon的通过web访问的管理接口